
Perguntas Frequentes - Phantom 4 RTK
Qual a diferença entre o Phantom 4 RTK e os produtos da série Phantom anteriores?
Enquanto os drones da série Phantom anteriores eram construídos em torno de fotógrafos profissionais e amadores, o Phantom 4 RTK foi projetado para usuários industriais para mapeamento de alta precisão e outras missões de aquisição de dados. Embora o Phantom 4 RTK compartilhe uma câmera e tamanho de formato semelhantes, ele também adiciona um módulo de posicionamento RTK, um novo sistema TimeSync, um aplicativo de mapeamento específico e muito mais.
Quais hélices o Phantom 4 RTK usa?
O Phantom 4 RTK usa as mesmas hélices de liberação rápida 9455s que o Phantom 4 Pro.
Posso pilotar o Phantom 4 RTK em outros países ou regiões?
Não, o Phantom 4 RTK possui versões específicas para cada país / ou regiões. Os usuários podem verificar o código da versão na embalagem do produto ou por meio do aplicativo GS RTK (acesse Informações da aeronave -> Firmware). No Brasil a Versão BR Phantom RTK, vc encontra no revendedor oficial Dji Brasil.
CÂMERA:
Qual é a diferença entre a câmera do Phantom 4 RTK e a câmera do Phantom 4 Advanced / Pro?
Enquanto o Phantom 4 RTK e o Phantom 4 Pro / Advanced compartilham o mesmo sensor CMOS de 1 polegada e 20 megapixels, o Phantom 4 RTK melhorou os recursos da câmera para mapeamento por meio de um novo processo de gravação de distorção de lente. Cada câmera Phantom 4 RTK passa por um processo de calibração que mede as distorções da lente e registra os parâmetros de não distorção correspondentes. A câmera permite que os usuários gerem as imagens originais sem correção de distorção, bem como os parâmetros de não distorção no arquivo XMP para pós-processamento.
O filtro ND do Phantom 4 Pro pode ser usado no Phantom 4 RTK?
Sim, os filtros ND feitos para o Phantom 4 Pro também podem ser usados para o Phantom 4 RTK.
O processador de sinal digital (DSP) da câmera Phantom 4 RTK suporta correção de distorção?
Não, você pode habilitar a correção de distorção na câmera, mas as imagens serão menos precisas em comparação com a eliminação de distorção no software de pós-processamento.
Como a câmera Phantom 4 RTK é calibrada?
Cada câmera Phantom 4 RTK passa por um processo de calibração que mede as distorções da lente e registra os parâmetros de não distorção correspondentes no XMP DewarpData. Quando a “correção de distorção” é desligada, a imagem original com distorção será gerada. Quando a “correção de distorção” é ativada, os parâmetros usados para eliminar a distorção não são os parâmetros calibrados, mas os parâmetros de design da câmera. Ao eliminar as distorções, isso não é feito pixel a pixel.
CONTROLE REMOTO:
Quais são os recursos de destaque para o controle remoto padrão do Phantom 4 RTK?
1. Display embutido de 5,5 polegadas, 1080P, brilho de até 1000 nits. Você pode ver a tela sob forte luz do sol. O controlador pode trabalhar em baixas temperaturas.
2. Suporta baterias trocáveis a quente.
3. O aplicativo GS RTK pré-instalado pode executar fotogrametria, waypoint e outros tipos de missão.
4. Transmissão de vídeo ocuSync.
Como posso alternar entre os modos FCC e CE?
A comutação de modo FCC e CE não está disponível.
Posso conectar o Phantom 4 RTK a outros controladores da série Phantom? Não.
TRANSMISSÃO DE VÍDEO:
Qual é a distância de transmissão de vídeo do Phantom 4 RTK?
A distância efetiva de transmissão de vídeo depende do seu método de operação (como a posição da antena) e do ambiente de vôo real. Em um ambiente aberto e não obscurecido, a distância máxima é de 7 km quando compatível com FCC e 5 km quando compatível com CE. (2,4 GHz).
O que devo fazer se o aplicativo enviar a seguinte notificação: "o sinal do controle remoto está fraco, ajuste a antena"?
Isso significa que o posicionamento incorreto da antena provavelmente está afetando o sinal de transmissão de vídeo e, portanto, a qualidade da visualização em tempo real. Você pode tentar ajustar as antenas para que os lados planos da antena apontem para o Phantom 4 RTK.
Posso continuar minha missão de mapeamento automatizado se o Phantom 4 RTK perder o sinal de transmissão de vídeo durante sua missão?
Sim, se o sinal de transmissão de vídeo for perdido, você pode reconectar e continuar a missão de mapeamento.
BATERIA:
Posso usar minhas baterias Phantom 4 Pro com o Phantom 4 RTK e vice-versa?
Sim, as baterias Phantom 4 RTK e Pro são compatíveis entre si e têm a mesma capacidade, o que significa que o tempo de voo não será afetado.
Quanto tempo leva para carregar totalmente uma bateria Phantom 4 RTK?
Demora cerca de 60 minutos para carregar totalmente uma bateria Phantom 4 RTK.
Como devo cuidar e armazenar minhas baterias?
As baterias devem ser armazenadas em um ambiente seco, ventilado e fresco, longe do fogo, alta temperatura e materiais inflamáveis. Não coloque a bateria em um ambiente que possa fazer com que sua temperatura aumente, como sob o sol ou diretamente luz solar dentro do carro. O armazenamento de longo prazo deve garantir que a quantidade de eletricidade seja superior a 50%, mas não totalmente carregada. A bateria deve ser carregada e descarregada para manter a atividade da bateria a cada 3 meses para armazenamento de longo prazo.
O que significa quando o ícone da bateria fica amarelo no aplicativo?
Isso significa que a tensão da célula da bateria está baixa e deve ser carregada em breve. Tenha cuidado ao voar sob esta situação.
Posso usar baterias Phantom 4 RTK em baixas temperaturas?
A capacidade da bateria (e, portanto, o tempo de vôo) diminuirá drasticamente em baixas temperaturas (<-10 ℃ / 14 ℉). É recomendável aquecer as baterias a 20 ℃ / 68 ℉ antes de voar para limitar este efeito. Para segurança de vôo, a bateria não pode ser carregada quando a temperatura está abaixo de 5 ℃ / 41 ℉ ou acima de 40 ℃ / 104 ℉.
Por que as baterias começam a esquentar após um armazenamento de longo prazo?
Este é um fenômeno normal. Quando as baterias são armazenadas por um longo tempo com mais de 65% da carga restante, um procedimento de descarga automática é ativado para diminuir o nível da bateria para 65%, durante o qual as baterias irão aquecer.
POSIÇÃO E ORIENTAÇÃO:
Quais opções eu tenho para fazer referência aos dados de posicionamento do Phantom 4 RTK?
1. Conecte-se localmente via OcuSync à sua estação móvel D-RTK 2. (RTCM3.2).
2. Conecte-se remotamente por meio de um Dongle 4G a uma rede RTK personalizada usando uma conta NTRIP. (RTCM3.2).
3. Conecte-se remotamente através de um hotspot WiFi a uma rede RTK personalizada usando uma conta NTRIP. Não disponível na Europa. (RTCM3.0 / RTCM3.1 / RTCM3.2).
Qual a precisão de posicionamento que o Phantom 4 RTK pode alcançar?
O Phantom 4 RTK pode atingir dados precisos de 1 cm + 1 ppm (horizontal), 1,5 cm + 1 ppm (vertical).
O que é TimeSync e como ele garante a precisão do posicionamento de cada imagem obtida no Phantom 4 RTK?
O TimeSync alinha continuamente o controlador de vôo, a câmera e o módulo RTK e, a seguir, ajusta os dados de posicionamento para o centro do CMOS e grava os dados nos formatos EXIF e XMP.
Quais são as diferenças entre os modos PPK e RTK? Como usá-los?
RTK e PPK são duas tecnologias cinemáticas diferentes que fazem referência a dados de maneiras diferentes. O RTK e o PPK alcançam precisão centimétrica. RTK é recomendado para usuários voando em ambientes que permitem conexão em tempo real via OcuSync ou 4G e preferem conveniência e eficiência. Para usuários que não exigem pontualidade e / ou precisam operar em condições sem conectividade, o PPK é a melhor opção.
Quais tipos de arquivo PPK o Phantom 4 RTK suporta? Para que são esses arquivos e como faço para usá-los?
1. EVENTLOG.bin é um formato binário que armazena exposição, registro de data e hora e arquivo de log.
2. PPKRAW.bin é um formato RTCM3.2 MSM5 que armazena dados de observação de satélite e dados de efemérides.
3. Rinex.obs é um formato de arquivo Rinex criado após a transcodificação.
4. Timestamps.MRK é um formato ASCII que armazena a exposição e o registro de data e hora.
Como encontro as informações XMP de minhas fotos do Phantom 4 RTK?
Abra a foto em formato de texto e pesquise "XMP" para encontrar essas informações em cada foto.
Quando tiro uma foto com o Phantom 4 RTK, de onde estão os metadados de localização que registram a posição?
Devido ao novo sistema TimeSync, cada foto armazena a posição do centro CMOS em seus metadados.
Como posso obter o valor de compensação entre o centro de fase da antena e o centro CMOS?
Para cada foto, o valor de compensação entre o centro de fase da antena do módulo RTK e o centro CMOS no sistema de coordenadas NED é registrado no timestamp, que pode ser encontrado no arquivo Timestamp.MRK na pasta "survey".
Quais são os métodos de cálculo utilizados pelo Serviço Cloud PPK?
Existem 2 maneiras que o Cloud PPK Service usa para calcular os dados PPK: estação base DJI e estação base RINEX.
1. Estação base DJI: Conecte a estação móvel GNSS de alta precisão DJI D-RTK 2 e o controle remoto por meio de um cabo USB para carregar os dados PPK na estação base. Após o servidor adquirir os dados da aeronave e da Estação Móvel D-RTK 2, ele iniciará o cálculo do PPK automaticamente.
2. Estação Base RINEX: Converta os valores de observação de satélite recebidos por estações base de terceiros no formato RINEX padrão, então importe os dados de origem PPK para o controlador remoto e carregue-os no servidor em nuvem para cálculo PPK.
Em qual pasta de arquivo SD cade os dados de observação de satélite de terceiros devem ser armazenados quando eu uso uma estação base RINEX para cálculo de PPK? Onde os resultados do cálculo PPK serão armazenados?
Você deve salvar os dados de observação de satélite de terceiros em cartão SD / third_base / no cartão SD no controle remoto. Os resultados PPK serão armazenados em cartão SD / DCIM / SURVEY / (nome do arquivo de missão) /result.csv.
Como o Serviço PPK em Nuvem adquire as informações de coordenadas geográficas de estações base de terceiros ao usar uma estação base RINEX para o cálculo de PPK?
1. Se o arquivo RINEX contiver um campo “APPROX POSITION XYZ”, que inclui a localização aproximada da estação base no sistema de coordenadas ECEF, o Serviço Cloud PPK será capaz de analisar a localização com base nas informações do campo e converter em coordenadas geográficas. Essas coordenadas serão definidas como coordenadas padrão para o centro de fase da antena da estação base.
2. Os usuários também podem inserir manualmente as informações de longitude e latitude de onde a estação base está configurada, bem como a distância entre a parte inferior da estação base e o centro de fase da antena (APC). Com essas informações, o serviço PPK em nuvem executará cálculos com base nas informações do centro de fase da antena inseridas pelo usuário.
3. O Serviço Cloud PPK também pode adquirir a localização do centro de fase da antena por meio de Posicionamento de Ponto Único (SPP) com dados RINEX. Essas coordenadas serão usadas para o cálculo do PPK.
Onde está disponível o serviço Cloud PPK?
O serviço está disponível em todos os lugares, exceto nos EUA, Canadá, RAE de Hong Kong e RAE de Macau.
Quando uso a estação móvel D-RTK 2 como rover RTK, onde os arquivos de coordenadas são armazenados?
Você pode encontrá-los em / DJI / EXPORT / RTK_SCOUT.
Como o rover RTK mede os dados?
Existem duas maneiras:
1. Medição instantânea
2. Medição média usando 10 valores coletados durante 2 segundos
A estação móvel D-RTK 2 precisa ter um RTK “FIX” para ser usada como rover?
1. Para medição instantânea: sim, tem que ser “FIX”.
2. Para medição média: recomenda-se que o sinal RTK seja “FIX”.
Como faço para executar atualizações de firmware na estação móvel D-RTK 2?
Atualmente você só pode atualizá-lo por meio do Controlador Remoto Phantom 4 RTK (não o Controlador Remoto SDK).
O que é o modo “manutenção de precisão de posicionamento RTK”?
Quando o modo de manutenção de precisão de posicionamento RTK está habilitado, e se os sinais são perdidos da estação base RTK, a precisão de posicionamento diminuirá lentamente da precisão absoluta de 1 cm + 1 ppm para cerca de 20 cm. O valor da Bandeira RTK nos dados XMP da imagem será 16 e o status RTK do controle remoto permanecerá em FIX.
PROGRAMAS:
Como atualizo o firmware do Phantom 4 RTK?
O processo de atualização do firmware do Phantom 4 RTK é semelhante ao do Phantom 4 Pro. Usando o software DJI Assistant 2, você pode atualizar o controlador remoto e o firmware da aeronave separadamente.
Você também pode atualizar o drone e o controle remoto simultaneamente através do aplicativo GS RTK. Primeiro, você conecta o controle remoto à aeronave com cabos OTG e USB e, em seguida, segue os procedimentos explicados no aplicativo GS RTK do controle remoto.
Em que situações os sensores esquerdo / direito TOF e infravermelho estão ativos?
Atualmente, o TOF esquerdo / direito e os sensores infravermelhos não estão ativos, portanto, voe com cuidado.
Quais programas de software posso usar para controlar meu Phantom 4 RTK e planejar voos?
Você pode usar o aplicativo GS RTK para controle de voo e planejamento, e um software de mapeamento baseado em PC, como DJI Terra, para missões de mapeamento. Se você adquirir o controlador remoto SDK, também poderá usar DJI GS Pro, DJI Pilot e uma variedade de aplicativos de terceiros desenvolvidos usando DJI 'MSDK.
Qual plataforma de mapeamento está sendo usada para fornecer dados de mapa ao aplicativo Phantom 4 RTK?
Mapbox é usado para fornecer dados de mapa para o aplicativo GS RTK.
Quais são as limitações dos waypoints do Phantom 4 RTK?
1. No aplicativo GS RTK: máximo de waypoints: 199.
2. No DJI Terra: os waypoints podem estar separados por no máximo 2km e no máximo 99 waypoints podem ser definidos. A distância total de uma missão de waypoint não pode exceder 40km, no modo fotogrametria a distância máxima é de 100km.
Posso definir waypoints inserindo valores de longitude e latitude ao usar o modo Waypoint? Não.
Ao importar arquivos de área KML para programas de software, qual é o número máximo de pontos de limite que posso definir?
Atualmente, o aplicativo GS RTK oferece suporte a até 199 pontos de limite e o DJI Terra oferece suporte a até 99.
Em quais missões posso importar arquivos KML?
Missões de Fotogrametria 2D, Fotogrametria 3D (Grade dupla), Fotogrametria 3D (Multi-orientação), Segmentação de blocos e Modo de percepção do terreno.
No modo de percepção do terreno, há uma maneira de desligar a exibição do mapa de renderização do terreno?
Sim. Toque em ··· no canto superior direito no Modo de percepção do terreno e toque em ··· na barra lateral, você pode desligar a tela lá em Configurações gerais.
Quando eu usaria a segmentação em bloco?
A segmentação de blocos divide grandes áreas em vários conjuntos de trajetórias de voo, o que ajudará a melhorar a eficiência. Recomenda-se planejar esses voos sobre áreas geralmente planas com pouca alteração na elevação para obter os melhores resultados.
Como planejo missões de vôo com a segmentação em bloco?
1. Selecione a segmentação do bloco.
2. Definir a área de mapeamento: definir manualmente a área. de mapeamento ou importar arquivos kml.
3. Ajuste o tamanho e a direção da grade.
4. Ajuste os parâmetros, como parâmetros da câmera e taxa de sobreposição.
Na segmentação de blocos, as trajetórias de vôo são planejadas separadamente para cada região dividida ou em conjunto?
As rotas de vôo são planejadas em conjunto para todas as regiões. Os usuários não podem ajustar a taxa de sobreposição, altura, direção da rota e outros parâmetros para cada área individualmente.
Como posso controlar várias aeronaves simultaneamente ao executar missões de segmentação de blocos?
Depois de terminar o planejamento, vincule cada Phantom 4 RTK com a missão de vôo correspondente. Então, você pode iniciar uma das missões sozinho ou iniciar todas as missões simultaneamente.
Quantos Phantom 4 RTK posso controlar ao mesmo tempo enquanto uso a segmentação de bloco? No máximo 5.
Se eu operar várias aeronaves ao mesmo tempo, é possível que elas colidam entre si?
Não. Graças à tecnologia de detecção de obstáculos, quando dois ou mais Phantom 4 RTK chegarem perto um do outro, eles irão desacelerar ou pairar automaticamente. Eles só retomarão a missão quando a área for limpa.
Posso voar uma missão com Phantom 4 RTK usando Altitude Absoluta?
Sim, mas apenas para o voo do ponto de referência.
Como faço para voar em uma missão com o Phantom 4 RTK usando Altitude Absoluta?
1. Entre nas configurações RTK e confirme se o status RTK é FIX.
2. Selecione Waypoint Flight, comece a adicionar waypoints com RTK habilitado, o sistema irá registrar automaticamente a altitude absoluta de cada waypoint.
3. Selecione Altitude Absoluta na janela pop-up Altura ao realizar a operação.
Posso voar uma missão usando Altitude Absoluta se RTK não estiver habilitado ou se RTK não estiver “FIX” no Phantom 4 RTK?
Não. Você só pode voar usando o modo Altitude Relativa padrão sem RTK ou se o RTK não for “FIX”.
Quando preciso ajustar a Altura Relativa?
Quando a elevação do local de decolagem for diferente da elevação da área sendo mapeada, você pode ajustar a Altura Relativa para garantir taxas de sobreposição suficientes na medição. Veja a ilustração abaixo:
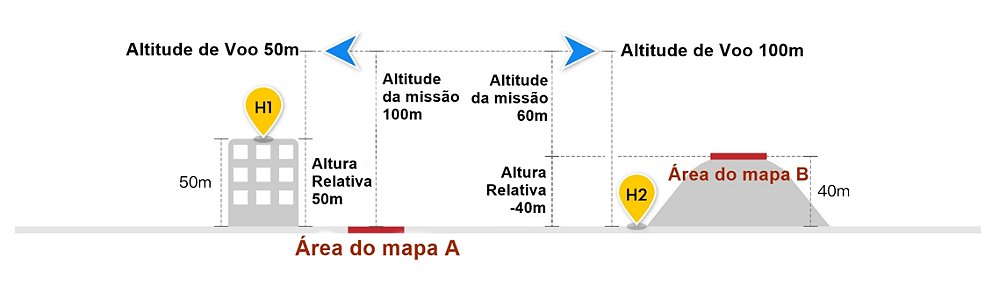
Se o drone decolar de um edifício de 50m marcado como H1 na ilustração, a área sendo mapeada é marcada A e a altitude esperada para coleta de dados aéreos é 100m, você pode definir a Altitude da Missão em 100m e Altura Relativa em 50m. Da mesma forma, se o drone decolar de H2 para mapear a Área B, que é uma colina com uma elevação de 40 m, e a altitude esperada para coleta de dados aéreos for 60 m, defina a Altitude da Missão como 60 m e a Altura Relativa como -40 m . Você pode ajustar a Altura Relativa nas missões de Fotogrametria 2D, Fotogrametria 3D (Grade Dupla), Fotogrametria 3D (Multi-orientação), Missão de Voo Linear e Missões de Segmentação de Bloco. a altura relativa
Em que cenários podem ser usadas missões de trajetória de vôo de altitude variável?
Trajetos de vôo de altitude variável são úteis para tirar fotos de modelagem em cinturões de terreno com grandes diferenças de altitude, por exemplo, linhas de transmissão de energia, estradas e rios com topografia ascendente e descendente.
Há alguma restrição de altitude e ângulo entre os waypoints ao planejar uma trajetória de voo de altitude variável?
Não há restrições de altitude entre dois waypoints. A altitude de vôo real é determinada pelo limite de altitude. Não há restrições de ângulo.
Uma missão de rota de vôo de altitude variável oferece suporte a arquivos KML importados? Quais são os requisitos para arquivos KML?
Sim. Clique no ícone “KML” no menu de funções para selecionar o arquivo. O tipo de arquivo KML deve ser linear e o formato do campo para altitude absoluta no arquivo KML deve ser “absoluto”.
O que é “altitude de missão” em uma missão de trajetória de voo de altitude variável?
É a distância entre o plano de voo e o plano entre os pontos A, B e C.
Uma trajetória de vôo pode ser executada em sequência reversa em uma missão de trajetória de vôo de altitude variável?
Sim, uma trajetória de vôo pode ser executada em sequência reversa. Depois que uma rota de vôo foi gerada a partir de waypoints registrados, clique no botão de sequência reversa na parte inferior da interface para reverter a sequência de vôo de waypoint.
Em quais cenários as trajetórias de vôo inclinadas podem ser usadas?
Eles são úteis para cenários que envolvem elementos de modelo, como encostas e fachadas de edifícios. O planejamento de trajetória de vôo inclinada gera trajetórias de vôo automaticamente para uma superfície ou fachada inclinada e coleta os dados fotogramétricos com sucesso.
Qual é a função da vista plana da trajetória de vôo ao executar uma missão de trajetória de vôo inclinada?
Durante uma missão de voo inclinado, a interface do aplicativo exibirá uma janela de transmissão de imagem, uma janela de visualização de mapa e uma janela de visualização de planta. A janela de visualização do plano está no canto inferior direito da interface. Durante uma missão, ele é capaz de exibir a trajetória de vôo em uma perspectiva vertical em relação ao avião, de modo a auxiliar na determinação da área a ser mapeada e no posicionamento da aeronave.
O que são “distância de missão” e “altitude de missão” em uma missão de trajetória de vôo inclinada?
"Distância da missão" e "altitude da missão" são usados para ajustar a distância entre o plano de vôo e o plano entre os pontos A, B e C. Se a inclinação for íngreme ou totalmente vertical, você pode selecionar o modo de ser perpendicular ao plano alvo, e ajustar a distância entre o plano de vôo e o plano entre os pontos A, B e C, definindo a “distância da missão”; se a inclinação for relativamente plana, você pode usar o modo de ser perpendicular ao plano horizontal e ajustar a distância entre o plano de voo e o plano entre os pontos A, B e C definindo a "altitude da missão".
Como posso garantir a segurança do voo ao planejar uma trajetória de voo inclinada?
Ao planejar os pontos de referência para uma trajetória de vôo sobre o plano inclinado entre os pontos A, B e C, preste atenção à área a ser mapeada com base na distância expandida padrão do Ponto C e certifique-se de que não haja riscos de segurança de vôo dentro da expansão padrão área.
Mapeamento.
Quais formatos de dados diferenciais são suportados pelo Phantom 4 RTK?
Atualmente, o Phantom 4 RTK suporta dados RTCM 3.0, dados RTCM 3.1, dados MSM4, MSM5, MSM6 e dados MSM7 em RTCM3.2.
As coordenadas são medidas pelo Phantom 4 RTK coordenadas ou coordenadas absolutas?
As coordenadas medidas pelo Phantom 4 RTK são coordenadas absolutas em WGS84.
Como calculo uma altitude de vôo apropriada com base em um valor GSD?
Você pode consultar a equação H = 36,5 * GSD para estimar uma altitude de vôo apropriada. Observe que a distância de amostragem do solo GSD nesta equação é medida em centímetros, enquanto H (altura ou altitude de vôo) é medida em metros. Por exemplo, GSD = 2,74 cm, quando altitude = 100 m.
As imagens capturadas pelo Phantom 4 RTK armazenam informações de altitude? Em caso afirmativo, como esses dados são armazenados?
Elevação e altitude relativa (em relação ao seu ponto de decolagem) são armazenadas nas fotos capturadas pelo Phantom 4 RTK. A altitude absoluta pode ser usada para mapeamento e a altitude relativa pode ser encontrada no arquivo XMP.
Como posso capturar fotografia oblíqua ao usar o Phantom 4 RTK?
Imagens oblíquas podem ser capturadas durante o vôo no modo Fotogrametria no aplicativo GS RTK. No modo Fotogrametria, você pode ajustar o ângulo do cardan de -90 ° a -45 ° em Configurações da câmera para o seu plano de vôo. Você só pode definir um valor de ângulo do cardan de cada vez, portanto, para locais onde deseja capturar vários ângulos, você pode planeje a mesma missão e apenas ajuste o ângulo da câmera.
Posso criar um modelo 3D ou nuvem de pontos com software de terceiros usando as imagens capturadas pelo Phantom 4 RTK? Em caso afirmativo, qual é a precisão do modelo criado?
Sim, você pode usar um software de terceiros para processar dados de imagem Phantom 4 RTK e criar modelos; no entanto, a precisão pode variar com base no algoritmo fotogramétrico usado. Consulte o fornecedor do software de terceiros para obter mais informações sobre a precisão esperada.
Quando não há Pontos de Controle de Solo (GCPs), qual é a precisão do modelo que os dados do Phantom 4 RTK podem fazer? A precisão pode atender aos requisitos de triangulação aérea na escala 1: 500?
As ortoimagens criadas com as imagens capturadas pelo Phanton 4 RTK e software de reconstrução selecionado mostraram uma precisão absoluta de cerca de 5 cm, enquanto a precisão necessária na triangulação aérea na escala 1: 500 é inferior a 30 cm. Isso significa que a precisão do Phantom 4 RTK atende aos requisitos de mapas aéreos na escala 1: 500.
O Phantom 4 RTK é compatível com estações base de terceiros?
Não, você não pode conectar estações base de terceiros ao Phantom 4 RTK ou ao controle remoto por meio de uma estação de rádio. No entanto, você pode obter dados de um servidor de rede RTK via protocolo Ntrip em ambiente de rede 4G / Wi-Fi. Os dados de observação de satélite também podem ser salvos na aeronave para que os usuários realizem cinemática pós-processada (PPK) para concluir suas tarefas.
Quando eu coleto ortoimagens com o Phantom 4 RTK, o que pode causar imprecisões na elevação?
As possíveis causas incluem:
1. O GCP está definido em um sistema de coordenadas ou datum de altura diferente daquele da posição do Phantom 4 RTK. Verifique se eles estão no mesmo sistema de coordenadas.
2. O status do RTK do Phantom 4 RTK não é “FIX”. Certifique-se de que o status RTK seja “FIX” ao coletar dados.
3. Os parâmetros internos da câmera usados pelo software de pós-processamento não são precisos.
Se os parâmetros da câmera interna usados pelo software de modelagem de pós-processamento forem imprecisos, resultando em uma altitude imprecisa, como a precisão da altitude pode ser melhorada ao coletar dados ortofotográficos usando um Phantom 4 RTK?
“Otimização de altitude” já está definida por padrão nas configurações de parâmetro para os modos de planejamento “Fotogrametria 2D” e “Segmentação de bloco”. Após essa função ser habilitada, o Phantom 4 RTK retornará ao centro da área mapeada após completar a trajetória de vôo e coletará imagens dos recursos inclinados para melhorar a precisão da altitude. Esta função só se aplica aos modos de planejamento “Fotogrametria 2D” e “Segmentação de blocos”.
**IMPORTANTE: As respostas publicadas não substitui a leitura do manual de instruções que acompanha o produto, em
caso de duvida consulte o site da fabricante.

Categorias
Conteúdo
Sobre a loja
Na Tecno Drones Você Encontra Drone Homologado, Com Garantia Nacional. Acessórios Originais Dji e Descontos Exclusivos. Revenda Autorizada Com Produtos da Distribuição Oficial Dji no Brasil, Nossa loja fornece Drone para uso recreativo, profissional e linha enterprise com equipamentos de alto desempenho para empresas e indústria. Segurança ao comprar todos nossos produtos contam com Homologação da ANATEL e Nota Fiscal. Atendemos Todo o Brasil.
Pague com
Selos


TECNO DRONES® é uma marca registrada da LÍDER VAREJO COMÉRCIO ELETRÔNICO LTDA - CNPJ: 29.299.544/0001-88 © Todos os direitos reservados. 2026




